I am Shreshtha ,
a Robotics
Enginner
developer based
in India.

About
I'm a Robotics and Machine Learning Engineer passionate about building intelligent, real-world systems that can perceive, decide, and act. From autonomous navigation and control systems to deep learning models that process visual data, I enjoy solving complex problems at the intersection of software and hardware. I’ve worked on projects ranging from swarm robotics and SLAM to real-time object tracking and predictive maintenance using machine learning.
Download CVExpertise
- Robotics Programming
- Computer Vision
- Machine Learning
- Deep Learning
- Control Systems and Path Planning
- Sensor Integration
- Data Processing & Visualization
Experience
NEXTLAYER LLP
Robotics Engineer
FEBRUARY 2025 - Present
Currently working on cutting-edge autonomous robotics solutions including motion planning, sensor fusion, and ROS2-based navigation. Playing a key role in developing intelligent systems for real-world terrain adaptability and efficient task execution.
Robotree Robotics
Robotics Engineer & Developer
AUGUST 2024 – FEBRUARY 2025
Worked on developing robotics modules focusing on real-time control systems and embedded programming. Contributed to rover mobility mechanisms and integration of sensors for autonomous navigation using Arduino, Raspberry Pi, and Python.
Education
IIT, Madras
//Indian Institute of Technology
B.Sc. in Data Science and Programming
Jan 2023 – PRESENT
This parallel program has strengthened my analytical skills with a strong foundation in mathematics, statistics, machine learning, and programming. It complements my engineering background and supports my development in data-driven robotics and AI.
BIT Sindri
B.Tech in Electrical Engineering
SEPTEMBER 2022 – PRESENT
Currently pursuing my undergraduate degree from one of top engineering institutions. Gaining practical exposure in control systems, circuit design, embedded systems, and participating in many ISRO’s projects such as the Autonomous Rover and Drone Challenge as part of the Aeronautics and Robotics Club.
Recent Works
Here are some of my favorite projects I have done lately. Feel free to check them out.

RUDRA – Autonomous Six-Wheel Rover for Terrain Exploration
RUDRA is a robust, autonomous rover developed for navigating and analyzing harsh terrains, inspired by planetary surface missions. Designed with a rocker-bogie suspension, this rover ensures excellent stability and maneuverability across varied surfaces. With a strong emphasis on real-time autonomy and adaptability, RUDRA integrates sensor fusion, SLAM, and motion planning to deliver a complete exploration solution.
- Custom-built chassis from Aluminium 6061-T6 and AL-6063 square pipes for lightweight strength.
- Six-wheel rocker-bogie mechanism with ABS and TPU connectors to tackle 35° inclines and 45° tilts.
- with Intel RealSense camera, Lidar, accelerometer, and FPV system for autonomous sensing.
- Powered by planetary geared DC motors and controlled via Arduino Uno, Raspberry Pi 5, and L239D motor drivers.
- Software stack includes SLAM, Nav2 (ROS 2) for path planning, and Simple Commander API for task execution.
- Capable of terrain mapping, obstacle avoidance, and autonomous route execution over cubes and craters.
RUDRA reflects a synergy of mechanical excellence and AI-driven autonomy, making it a practical testbed for real-world exploratory missions.
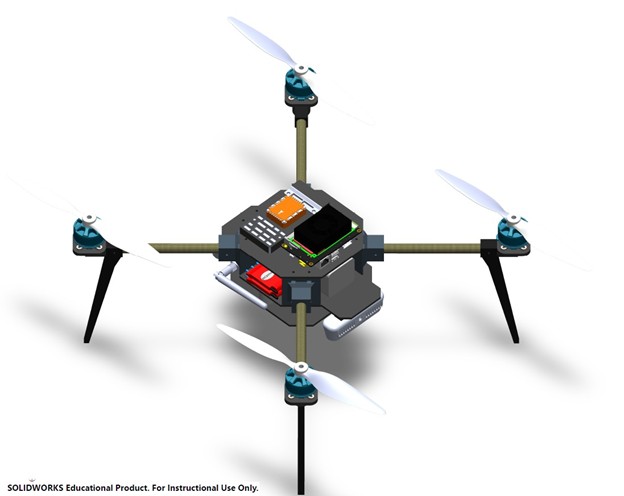
GPS-Denied Autonomous Drone for Mars-Like Environment (Inspired by NASA Ingenuity)
This project involved the development of a drone capable of autonomous flight in GPS-denied environments, similar to the Martian conditions faced by NASA’s Ingenuity Helicopter. The drone uses onboard visual data for real-time localization and navigation, offering a low-cost solution for extraterrestrial exploration.
- Implemented Visual Odometry for pose estimation using camera input and feature tracking.
- Utilized sensor fusion with IMU data for stable and accurate flight control.
- Designed lightweight frame and high-lift rotors to simulate flight in low-atmosphere conditions.
- Integrated basic autonomous takeoff and landing, along with object-avoidance algorithms.
- Inspired by Martian challenges – no GPS, limited air density, and fully onboard autonomy.
This drone demonstrates the potential of vision-based flight autonomy in space missions, tunnels, or cave systems, where traditional navigation systems fail.

ISRO’s Student Model Rocketry Challenge – Project NandiGhosh
NandiGhosh is a high-powered model rocket developed for the ISRO Model Rocketry Challenge, designed to carry a functional CanSat payload and reach an apogee of 1 kilometer. The rocket integrates telemetry, payload ejection, and descent control, making it a hands-on representation of satellite launch dynamics.
- Aerodynamically optimized rocket with multi-color gradient finish and custom-designed stabilizer fins.
- Powered by a solid propellant motor, targeting an altitude of 1 km.
- Contains a CanSat payload for atmospheric sensing and telemetry transmission.
- Includes parachute deployment system for safe descent and recovery.
- Designed under constraints and review standards provided by ISRO.
Project NandiGhosh showcases the practical application of aerospace engineering concepts—from propulsion and payload integration to flight testing and telemetry analysis.
Get In Touch
I love to hear from you. Whether you have a question or just want to chat about Robotics, tech & Literature — shoot me a message.